

 Реферат: Электропривод подъемного механизма крана
Реферат: Электропривод подъемного механизма крана
При включении автоматических выключателей QF, QF1, QF2 подается питание на силовую схему и схему управления. Срабатывает реле KF и замыкает свой главный контакт в схеме управления. При нажатии на кнопку SB1 (Подъем) происходит срабатывание реле KV1, которое замыкает свои контакты в схеме управления и в силовой цепи. Происходит подъем груза. При подъеме груза на максимальную высоту происходит срабатывание SQ2 и двигатель останавливается. Чтобы осуществить спуск груза, необходимо нажать на кнопку SB2 (Спуск). В этом случае срабатывает реле KV2, в силовой цепи и цепи управления срабатывают его контакты. Начинается спуск груза, который продолжается до замыкания конечного выключателя SQ1. Для остановки подъема или опускания груза предусмотрена кнопка SB3 (Тормоз).
Схема управления представлена на рис. 12.
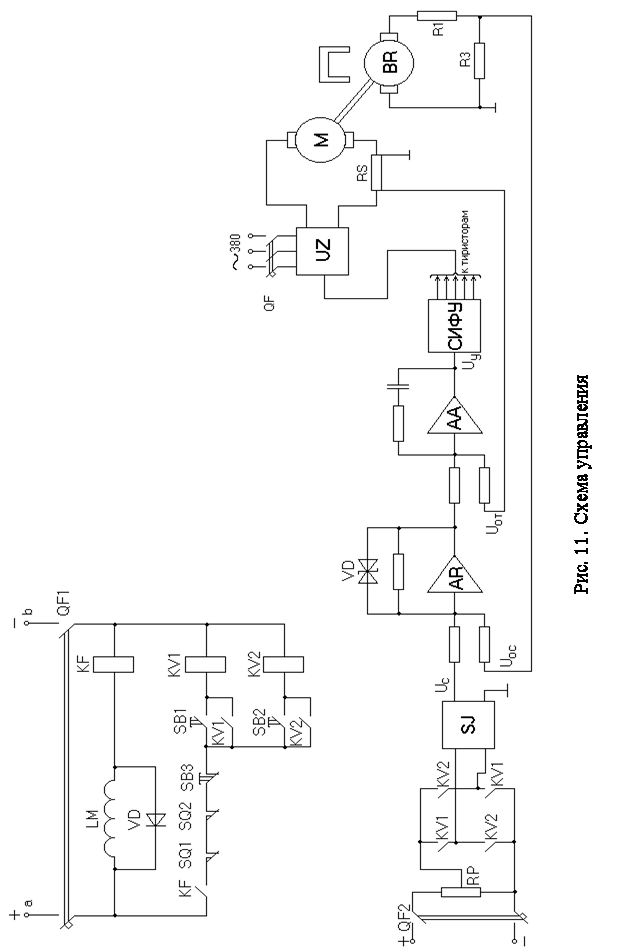
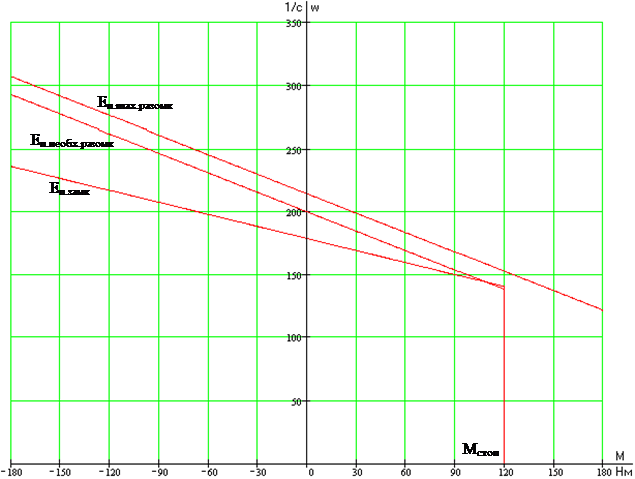
Рис. 12. Статическая характеристика в замкнутой
системе.
Выводы по главе 2.
В главе 2 были рассчитаны и построены статические характеристики в разомкнутой системе, а также уточненная нагрузочная диаграмма двигателя за цикл при линейном изменении ЭДС преобразователя. Выбрана структура замкнутой системы – система с подчиненным регулированием координат с настройкой на технический оптимум. Построены статические характеристики электропривода и разработана схема управления.
3. АНАЛИЗ ДИНАМИЧЕСКИХ СВОЙСТВ ЗАМКНУТОЙ СИСТЕМЫ.
3.1. Математическое описание электропривода.
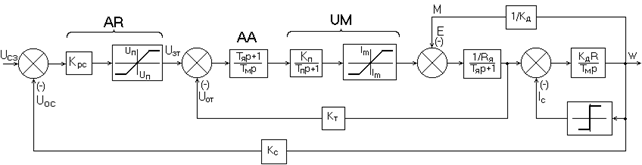
Структурная схема электропривода с внешним контуром регулирования скорости и
внутренним контуром тока якоря изображена на рис. 13.
Рис. 13. Структурная схема ЭП с подчиненным регулированием параметров.
Пропорциональный регулятор скорости AR и пропорциональный регулятор тока AA формируют управляющие воздействия из сигналов задания Uсз и Uзт и обратных связей Uос и Uот.
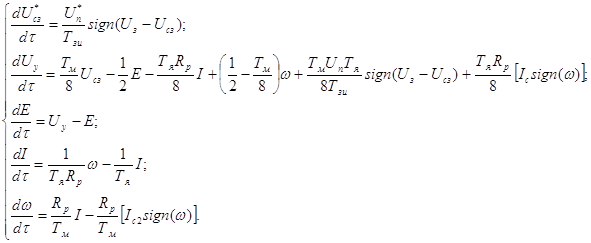
Работу электропривода с представленной структурой опишем системой алгебраических и дифференциальных уравнений, принимая во внимание, что коэффициент передачи регулятора скорости и постоянная времени регулятора тока равны соответственно:
![]() ;
;
![]() .
.
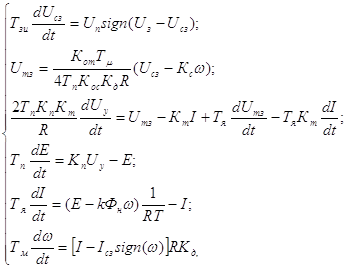
где Тзи – постоянная времени задатчика интенсивности;
Uп, Uз – напряжение, коммутируемое с помощью реле в составе задатчика интенсивности, и напряжение задания;
Кос и Кот – коэффициенты усиления цепей обратных связей по контуру и по току;
Rр – сопротивление якорной цепи двигателя.
Данная система уравнений может быть приведена к виду, удобному для моделирования, путем разрешения каждого уравнения относительно первой производной от соответствующей постоянной величины.
3.2. Расчет и построение переходных процессов.
Для построения переходных процессов пуска электропривода в замкнутой системе с подчиненным регулирования координат, используем ЭВМ и программу 20-sim. Для моделирования введем в компьютер схему, представленную на рис. 14.
Параметры для моделирования представлены в приложении 2.
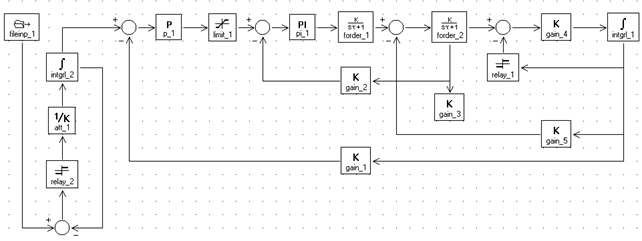
Рис. 14. Схема для расчета переходных процессов пуска в замкнутой системе.
Нагрузочная диаграмма процесса представлена на рис. 15:
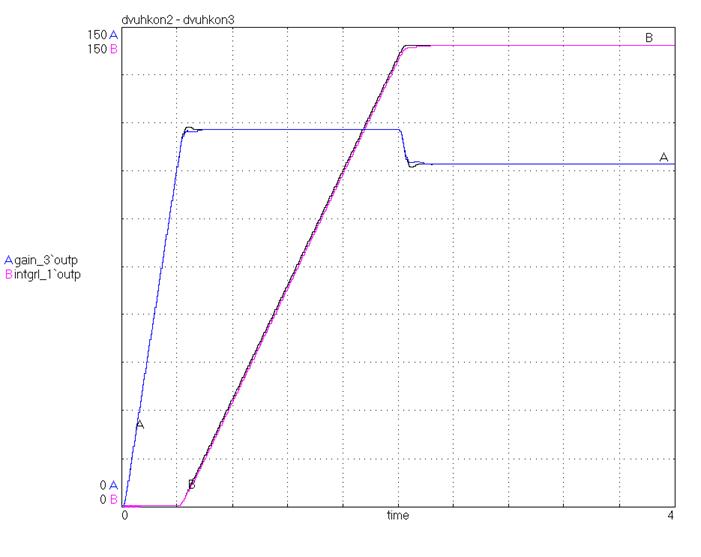
Рис.15. Нагрузочная диаграмма
двигателя при переходном процессе.
Выводы по главе 3.
В главе 3 проводились исследования динамики замкнутой системы. Было дано математическое описание электропривода и структурная схема. На ее основе с помощью программы 20-sim получены графики переходных процессов пуска в замкнутой системе. Их анализ показал соответствие результатов, полученных на ЭВМ, теоретическим. Учитывалось то, что пуск происходил при скачке задания, а контур настроен на технический оптимум.
4. РАСЧЕТ ЭНЕРГЕТИЧЕСКИХ ПОКАЗАТЕЛЕЙ ЭЛЕКТРОПРИВОДА.
4.1. Построение уточненной нагрузочной диаграммы двигателя за цикл.
Уточненная нагрузочная диаграмма двигателя за цикл при линейном изменении ЭДС рассчитана и построена в главе 2. Диаграмма представлена на рис. 7.
4.2. Проверка двигателя по нагреву и перегрузке по уточненной нагрузочной диаграмме.
Уточненное значение М![]() может быть определено путем
нахождения площади ограниченной графиком М
может быть определено путем
нахождения площади ограниченной графиком М![]() (t),
построенного на основе уточненной нагрузочной диаграммы.
(t),
построенного на основе уточненной нагрузочной диаграммы.
Данный расчет произведен с применением программы MathCad-2000 Pro.
Программу расчета см. приложение 3.
Площадь ограниченная графиком М![]() (t) при подъеме:
(t) при подъеме:
 H
H![]() .
.
Площадь ограниченная графиком М![]() (t) при спуске:
(t) при спуске:
![]() .
.
Общая площадь:
![]()
![]() .
.
Эквивалентный момент:
 Hм.
Hм.
Проверим двигатель по условиям нагрева и допустимой перегрузки:
Мэкв=33,748<Мном=47,747 Нм;
Мmax £2.5*Мном=2.5*47,747=119,368 Нм.
Итак, выбранный двигатель удовлетворяет данным условиям.
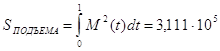
4.3. Расчет интегральных энергетических показателей электропривода за цикл работы.
Полезная работа совершенная ЭП за производственный цикл:
 ,
,
которую можно определить путем нахождения
площади, ограниченной графиком зависимости ![]() .
.
Данный расчет произведен с помощью программы Mathcad 2000-Pro.
Программу расчета см. приложение 3.
![]() Дж;
Дж;
![]() Дж.
Дж.
Полезная работа за цикл:
 = 2.597+1.968=4.565
= 2.597+1.968=4.565![]() Дж.
Дж.
Постоянные потери в двигателе:
![]() ,
,
где ![]() -
полные номинальные потери,
-
полные номинальные потери,
![]() -переменные номинальные потери.
-переменные номинальные потери.
![]() Вт;
Вт;
![]() Вт.
Вт.
Постоянные потери:![]()
![]() 1536-688.29= 847.85 Вт.
1536-688.29= 847.85 Вт.
Постоянные потери энергии за цикл:
![]() Дж.
Дж.
Переменные потери энергии за цикл:
![]() Дж,
Дж,
где ![]() А.
А.
Потери энергии за цикл:
![]() Дж.
Дж.
КПД за цикл:
![]() .
.
Полученный КПД удовлетворяет требованиям электропривода.
Выводы по главе 4.
По рассчитанной ранее уточненной нагрузочной диаграмме путем нахождения площади, ограниченной графиком М2(t), было определено более точное значение Мэкв и проверен двигатель по нагреву и перегрузке. Оказалось, что двигатель удовлетворяет этим условиям. Также были рассчитаны интегральные энергетические показатели за цикл работы: полезная работа, потери и к.п.д.
ЗАКЛЮЧЕНИЕ.
В данной работе был исследован и разработан электропривод подъемного механизма крана, предназначенного для подъема и опускания груза и совершающий движение по заданному циклу. Целью работы являлось закрепление, углубление и обобщение знаний в области теории электропривода путем решения комплексной задачи проектирования конкретного производственного механизма.
На основе исходных данных и технических требований была, в результате анализа, выбрана схема электропривода. Был сделан вывод, что наиболее рациональной системой в данном случае является система ТП-Д. Далее, по нагрузочным диаграммам был выбран двигатель постоянного тока серии 2П и произведена проверка по условиям нагрева и допустимой перегрузки. Оказалось, что выбранный двигатель удовлетворяет этим условиям. Также рассчитан силовой преобразователь и выбраны элементы мостовой реверсивной схемы: трансформатор, тиристоры, дроссель. Рассчитаны статические характеристики в замкнутой и разомкнутой системах, а также построена уточненная нагрузочная диаграмма за производственный цикл. Выбор структуры замкнутой системы, следуя рекомендациям, был остановлен на системе с подчиненным регулированием координат с применением настройки на технический оптимум. Разработана схема управления с применением релейной аппаратуры. Рассчитаны переходные процессы на ЭВМ, а их анализ, исходя из физических соображений, показал, что полученные динамические показатели соответствуют заданным. Работа заканчивается расчетом энергетических показателей электропривода. Рассчитаны работа за цикл, потери и КПД. Значение КПД вполне приемлемо для данной системы – 62,13%. Здесь же по уточненной нагрузочной диаграмме из главы 2. был еще раз проверен двигатель по условиям нагрева и перегрузки.
