

 Реферат: Разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата
Реферат: Разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата
Упрощенная выборка имеет вид:
Таблица 4.3
| N | N- | N+ | ||
| Нормальный режим | 264 | 157 | 999 | |
| Отказ работы двигателя типа «не отключение» | 1 | 1000 | 1000 | 999 |
| 3 | 1000 | 1000 | 1000 | |
| 6 | 1000 | 1000 | 999 | |
| 8 | 999 | 1000 | 1000 | |
| Отказ работы двигателя типа «не включение» | 1 | 1000 | 157 | 1000 |
| 3 | 999 | 286 | 1000 | |
| 6 | 265 | 158 | 999 | |
| 8 | 264 | 157 | 1000 | |
Для наглядности построим гистограмму, и изобразим ее в виде функции – закона распределения, [8, 9, 25-29] для облегчения нахождения критической точки в методе статистических гипотез. Находим математические ожидания. Графики зависимостей приведены на (Рис. 4.9) [27-29]:
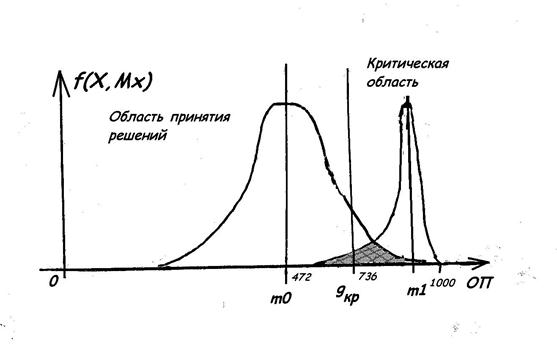
Рис. 4.9 – Аппроксимированная гистограмма
Здесь m0 и m1 -
математические ожидания. При рассмотрении левостороннего критерия, получили
критическую точку Gкр = 736. Т.о. ![]() =Gкр,
если, следуя алгоритму контроля, ОП <
=Gкр,
если, следуя алгоритму контроля, ОП < ![]() ,
то есть основания утверждать, что отказа в работе двигателя нет, в противном
случае, при попадании значения ОП в критическую область, т.е. ОП >=
,
то есть основания утверждать, что отказа в работе двигателя нет, в противном
случае, при попадании значения ОП в критическую область, т.е. ОП >= ![]() , ПО присваивается
значение единицы, и есть основания утверждать, что отказ в работе двигателя
есть [25].
, ПО присваивается
значение единицы, и есть основания утверждать, что отказ в работе двигателя
есть [25].
5 РЕЗУЛЬТАТЫ ЧИСЛЕННОГО МОДЕЛИРОВАНИЯ
Рассмотрим космический аппарат как упругое тело, описываемое уравнениями (3.1), (3.2), (3.4), (3..5). Рассмотрим режим построения базовой ориентации с учетом внешних возмущающих воздействий – аэродинамического и гравитационного, а также с учетом дрейфа нуля ГИВУС.
Для наглядности функционирования алгоритма стабилизации ДС КА, где в качестве гистерезиса используется пауза по времени, проведем моделирование СУО, с начальными условиями, приведенными в табл. 5.1.
Таблица 5.1
|
Вариант № |
Угловые скорости | Угловые ускорения | Моменты инерции |
| 1 |
Wx = 0.5 c-1 Wy = 0 c-1 Wz = 0 c-1 |
Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 |
Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
| 2 |
Wx = 1 c-1 Wy = 0 c-1 Wz = 0 c-1 |
Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 |
Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
| 3 |
Wx = 3 c-1 Wy = 1 c-1 Wz = 0 c-1 |
Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 |
Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
| 4 |
Wx = -4 c-1 Wy = 0 c-1 Wz = 0 c-1 |
Gx = -1 c-2 Gy = 0 c-2 Gz = 0 c-2 |
Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
| 5 |
Wx = 0 c-1 Wy = 3 c-1 Wz = 0 c-1 |
Gx = 0 c-2 Gy = 0 c-2 Gz = 0 c-2 |
Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
| 6 |
Wx = 0.5 c-1 Wy = 0.5 c-1 Wz = 1 c-1 |
Gx = 0.001 c-2 Gy = 0.001 c-2 Gz = 0.001 c-2 |
Ix = 500 Нмс2 Iy = 1500 Нмс2 Iz = 2500 Нмс2 |
Функционирование СУО с набором начальных условий варианта 2 табл. 5.1 во временной плоскости представлено на рис. 5.1, рис. 5.2, рис. 5.3.
Функционирование СУО с набором начальных условий варианта 1-6 табл. 5.1 на фазовой плоскости, представлено в приложении Б.
.
Рис. 5.1 – Зависимость угловой скорости от времени в канале X
Рис. 5.2 – Зависимость углового ускорения от времени в канале X
Как показали результаты моделирования (рис. 5.1-5.3), разработанный алгоритм стабилизации при наличии внешних возмущающих воздействий показал высокую эффективность в режиме построения базовой ориентации. Как показало моделирование, наиболее эффективным методом гашения шумов управления, которые возникают в следствии «скольжения» управляющего воздействия по границе области нечувствительности, при реализации логики управления, оказалось введение паузы по времени при выходе из зоны нечувствительности для двигателей малой тяги и зоны нечувствительности двигателей большой тяги. Для более эффективного гашения шумов, а соответственно снижения расхода рабочего тела, были введены в модель упругого КА двигатели малой тяги, с дополнительной зоной нечувствительности в законе управления и дополнительной задержкой по времени. Для сравнения был рассмотрен гистерезис с фиксированной зоной нечувствительности для ДБТ и ДМТ. Эффективность применения меньше по сравнению с паузой по времени, в связи с фиксированной зоной нечувствительности для всего диапазона угловых скоростей.
Рис. 5.3 – Зависимость управляющего момента от времени в канале X
Проведем моделирование СУО с различными наборами коэффициентов фильтра Льюинбергера. Начальные условия модели КА возьмем из 2-ого варианта табл. 5.1. Варианты коэффициентов фильтра Льюинбергера, представлены в табл. 5.2.
Результаты моделирования представлены в приложении В. Как показали результаты моделирования – минимальную погрешность оценивания показал 4-ый вариант наборов коэффициентов фильтра Льюинбергера. Как видно из результатов моделирование, наиболее длительный по времени переходной процесс показал 1-ый набор коэффициентов табл. 5.2 (~40 сек.), последующие наборы, показали тенденцию существенного снижения времени переходного процесса, так 3-ий набор коэффициентов фильтра Льюинбергера, показал (~8 сек.), вместе с тем, такая же тенденция наблюдается и с максимальной погрешностью оценивания. Так для 1-ого набора коэффициентов она составила (~0.01 1/с) , то для 4-ого набора коэффициентов максимальная погрешность оценивания составила (~0.0005 1/c). Следует отметить, что все четыре набора коэффициентов фильтра, были выбраны из области устойчивости рис. 4.2.1. 4-ый набор коэффициентов был найден методом интегральной квадратичной оценки качества, и является наиболее оптимальным, как показали результаты моделирования, для данных НУ взятых из табл. 5.1.
Таблица 5.2 - Коэффициенты фильтра Льюинбергера
| Вариант№ | Набор коэффициентов | ||
| K1 | K2 | K3 | |
| 1 | 0.9 | 0.27 | 0.027 |
| 2 | 3 | 3 | 1 |
| 3 | 6 | 12 | 8 |
| 4 | 20.516 | 149.611 | 0.042 |
.
Страницы: 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25
