

 Реферат: Разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата
Реферат: Разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата
В бесплатформенных (бескарданных) системах ориентации чувствительными элементами являются гироскопические датчики первичной информации, измеряющие углы или угловые скорости поворота КА и линейные ускорения (акселерометры). Эти датчики устанавливаются непосредственно на борту КА и работают совместно с цифровой вычислительной машиной, непрерывно производя расчет углов курса, крена и тангажа или иных параметров, определяющих ориентацию КА относительно базовой системы координат [1, 9, 21].
Бесплатформенные системы характеризуются жестким закреплением чувствительных элементов (гироскопов, акселерометров) на борту КА [1, 9]. Таким образом, принцип построения бесплатформенной системы ориентации (БСО) состоит в аналитическом построении расчетной системы координат на основе информации первичных датчиков. Математические расчеты проводятся при этом в процессе движения ЕА на бортовой ЦВМ и специальных вычислителях. Наличие блока гироскопов в типовой схеме БСО связано с решением задачи ориентации [9, 12, 15].
Возможность построения реальных конструкций и схем БСО обусловлена современным уровнем развития цифровой вычислительной техники. БСО присущи следующие отличительные признаки [15]:
- отсутствие ошибок, связанных с погрешностями стабилизации собственно платформы;
- отсутствие эффекта складывания рамок и, как следствие, отсутствие ограничений на угловые маневры КА;
- упрощение механической части, уменьшение габаритов, массы и энергоемкости системы за счет отсутствия карданова подвеса;
- потенциальное повышение надежности за счет резервирования.
Однако в таких схемах в большей степени сказываются погрешности, связанные с чувствительными элементами, поскольку они работают в более жестких условиях по сравнению с такими же элементами в платформенных системах [9, 12, 21].
Коэффициенты моделей ошибок определяются конструктивными или геометрическими характеристиками чувствительных элементов, в частности, датчиков. Величина погрешностей датчиков первичной информации зависит от самого характера линейного и углового движения КА, а при фиксированном характере движения КА модель ошибок для бесплатформенной системы содержит или требует учета большего числа членов в сравнении с моделью ошибок датчика платформенной системы [1, 3, 21]. В то же время наличие вычислителя вносит дополнительные погрешности, связанные с вычислениями. Особенностью решаемой задачи является накопление в результате интегрирования ошибок выходных параметров БСО. Вычислительные ошибки могут быть двоякой природы [21]:
- ошибки, связанные с методом вычислений. При «идеальной» вычислительной машине ошибки, связанные с методом вычислений, определяются порядком применяемого метода и числом удерживаемых членов ряда;
- ошибки, связанные с данным типом вычислителя, ограниченностью его памяти, быстродействия, длиной разрядной сетки и т. п.
Кроме того, особенностью аналитического построения базиса в текущем времени является запаздывание информации при нормальном функционировании вычислителя минимум на один такт работы вычислителя, а при сбоях в вычислителе ввиду отсутствия механической памяти (стабилизированной платформы) запаздывание информации может достигать недопустимо больших величин [12, 21].
Суммарная ошибка, обусловленная погрешностями чувствительных элементов и погрешностями вычислений, приводит к неточности построения расчетной системы координат относительно базисной системы и может быть разбита на три группы [1, 3, 9, 12 ,21]:
1) группа ошибок по модулю, от которой зависит искажение величины проекции преобразуемого вектора;
2) группа ошибок от неортогональности построенного базиса;
3) группа ошибок, определяющая поворот построенного аналитически базиса относительно идеального.
Общим для систем ориентации как платформенного, так и бесплатформенного типов является построение расчетной системы координат, в которой интегрируются уравнения ориентации и навигации, реализуемой, в первом случае электромеханическими устройствами и во втором случае аналитически [1, 3].
В общем случае аналитического построения расчетной системы координат задача ориентации КА решается с привлечением информации блока акселерометров об ускорении центра масс КА, хотя в некоторых случаях удается разделить задачу угловой ориентации и задачу определения местоположения центра масс КА [1]. Возможность такого разделения определяется выбором расчетной системы координат. Типовыми могут являться инерциальная система и горизонтальные системы координат. БСО могут быть построены на базе двухстепенных гироскопов, одноосных гиростабилизаторов, трехстепенных гироскопов со свободным подвесом и других видов чувствительных элементов [21].
В БИНС для решения задачи навигации необходим пересчет (с помощью матрицы направляющих косинусов) проекций вектора кажущегося ускорения, замеренного в жестко связанных с КА осях, на инерциальные оси [1, 10].
Для получения матрицы ориентации (матрицы направляющих косинусов) оси чувствительности трехкомпонентного блока измерителей абсолютной угловой скорости (блока двухстепенных гироскопов) должны быть зафиксированы относительно соответствующих осей чувствительности блока акселерометров. При решении навигационной задачи в БИНС задача ориентации решается независимо от уравнений поступательного движения. При этом погрешности проекций кажущегося ускорения на инерциальные оси определяются как погрешностью измерений акселерометров, так и погрешностью вычисления матрицы ориентации [1, 9, 10, 12].
Если используются датчики углового положения, то ориентация измерительной системы, связанной с датчиками, относительно базовой системы координат определяется в результате непосредственных измерений и их обработки. Однако общим во всех случаях решения задачи ориентации является измерения жестко закрепленными на борту датчиками таких кинематических величин, как угол или угловая скорость (угловое ускорение), с помощью, например, двухстепенных или трехстепенных гироскопов или же разнесенных на заданной базе акселерометров [21]. При этом наличие измерителей линейных ускорений в схеме, а также информации о напряженности нецентрального гравитационного поля Земли позволяет решать для такого типа систем как задачу ориентации, так и навигации [1, 3, 9].
Возмущенный режим работы БСО — это режим, при котором учитываются инструментальные погрешности чувствительных элементов, определенные угловой скоростью и угловым и линейным ускорениями основания [1, 3, 9, 12]. Модели ошибок этих элементов содержат кинематические величины с коэффициентами, зависящими от конструктивных характеристик чувствительных элементов.
Для уменьшения ошибок в БСО используются, например, корпусы блока гироскопов в монолитном исполнении, в которых и размещаются двухстепенные гироскопы [21]. Это позволяет обеспечить достаточную жесткость осей, связанных с измерительными осями гироскопов, и необходимую точность ориентации этих осей. При решении задачи ориентации относительно инерциального пространства используются различного вида кинематические уравнения [1,3]. Сравнительная их характеристика показывает, что в общем случае вне конкретной схемы затруднительно отдать предпочтение как определенному виду кинематических уравнений, так и определенным параметрам угловой ориентации. Однако это не исключает рациональный выбор параметров ориентации в каждой конкретной схеме реализации БСО [9].
2.1 Бесплатформенные инерциальные навигационные системы
Развитие бескарданных (бесплатформенных) базовых систем отсчета стала вполне возможной после того прогресса вычислительной техники, который привел к появлению надежных бортовых цифровых вычислительных машин, обладающих нужным объемом памяти и достаточным быстродействием [15]. Это сделало возможным непрерывное интегрирование уравнений движения космического аппарата при сколь угодно сложном характере его движения, опираясь на показания, по сути, тех же датчиков первичной информации, что и используемые в платформах. Следовательно, в бесплатформенных системах громоздкие устройства подвеса со следящими приводами «заменяются» интегрированием уравнений движения [9, 15].
Типичная схема бесплатформенной системы управления космическим аппаратом показана на (рис 2.1). С бортовой цифровой вычислительной машиной 1 соединены три группы датчиков, условно обозначенных через Д1,
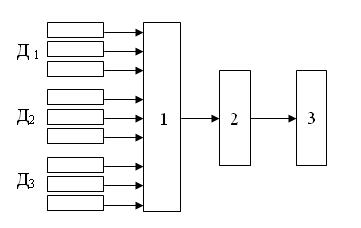
Рис 2.1 - Схема бесплатформенной системы управления ориентацией:
1 – бортовая цифровая вычислительная машина; 2 – блок согласования; 3-исполнительные органы
Д2 и Д3; вырабатываемые в машине сигналы управления преобразуются должным образом в блоке согласования 2, после чего поступают на исполнительные органы системы ориентации 3. Воздействуя на динамику космического аппарата (в зависимости от работы исполнительных органов, изменяется его угловое движение, и на входе вычислительной машины появляются измененные сигналы датчиков системы ориентации). На приведенной схеме все датчики условно разбиты на три группы в зависимости от основной задачи, выполняемой ими в полете.
Группа датчиков Д1, по сути, обеспечивает существование на борту математической «платформы». Этими датчиками могут быть любые устройства, позволяющие регистрировать составляющие p, q и r угловой скорости космического аппарата, параллельные осям Ox, Oy и Oz жестко связанного с ним триэдра осей. Имея непрерывно измеряемые значения p(t), q(t), r(t), вычислительная машина интегрирует кинематические уравнения углового движения и непрерывно определяет соответствующие три угла поворота жестко связанного с корпусом космического аппарата триэдра осей Oxyz относительно некоторого условного, например, начального положения этого триэдра Ox’y’z’. Поскольку в результате вычислений положение триэдра Oxyz всегда известно для текущего момента времени с нужной точностью, постольку известно и расположение относительно корпуса космического аппарата начального триэдра Ox’y’z’. Таким образом, триэдр Ox’y’z’, положение которого относительно корпуса непрерывно вычисляется, может служить базовой системой отсчета углов для поступательно движущихся осей ориентации; в этом смысле тройка датчиков Д1 и вычислительная машина заменяют гиростабилизированные платформы [1, 3, 9, 15].
Страницы: 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25
